ICRF Metrics
 The ICR framework includes the following metrics:
The ICR framework includes the following metrics:Actual reward, R: The amount of reward that the swarm got for its work. This could be a monetary value of collected resource, the number of items delivered, a customer satisfaction level reached, etc. The actual reward that a swarm is earning at a given point in time is ΔR.
Expected reward, R': Reward that the robots that know where worksites are (the "informed robots") could obtain if they did not have to travel to worksites and did not compete for the same unit of reward (they need to compete since worksites have a finite volume).
Potential reward, R*: A sum of the expected reward and the reward that could be obtained by all uninformed robots from all worksites (if the uninformed robots knew where the worksites were located).
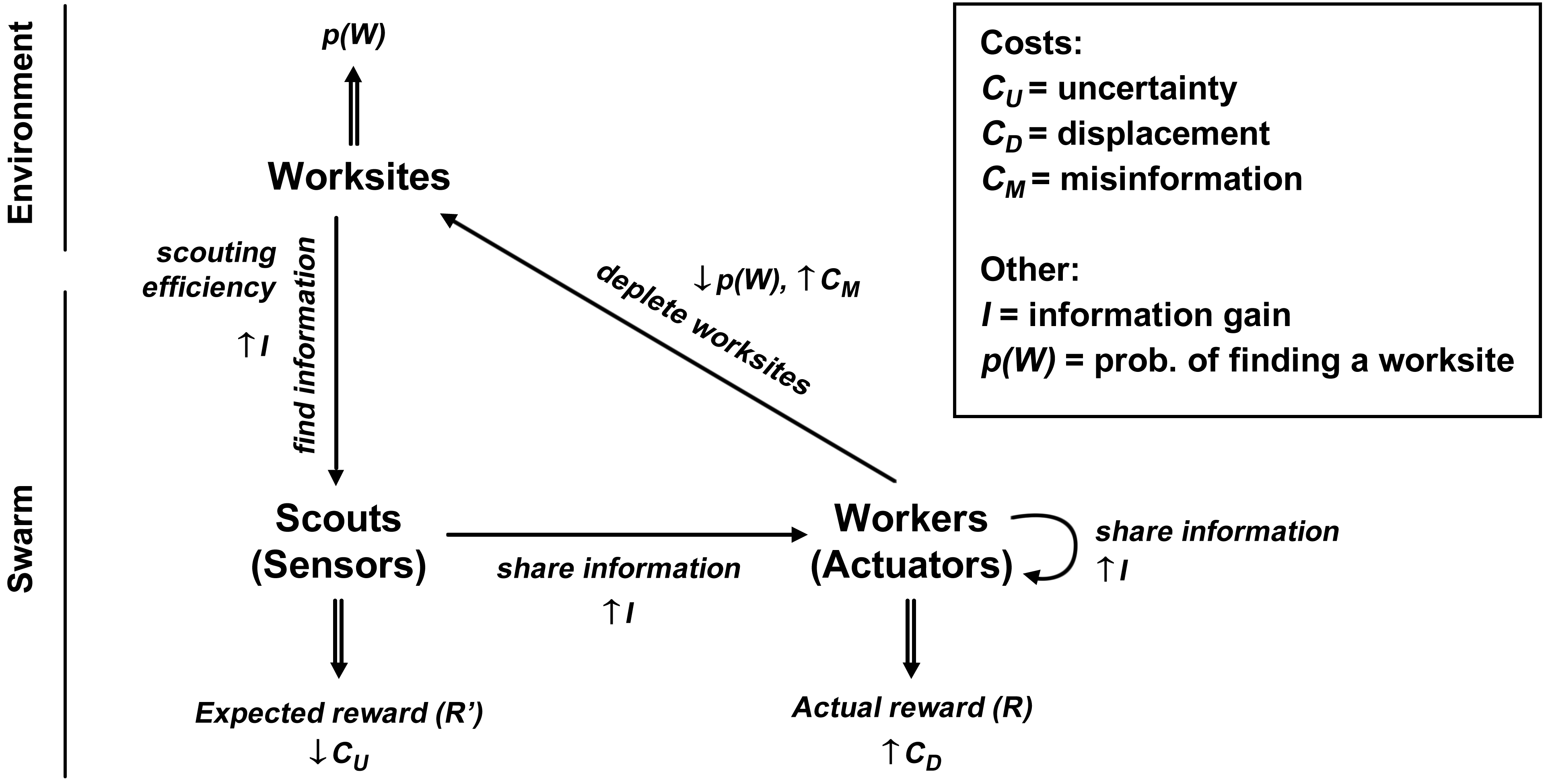
Scouting efficiency: Related to the time of the first worksite discovery.
Information gain, I: The amount of information, i.e., the number of informed robots, that the swarm has at a given point in time.
Information gain rate, i: The maximum rate at which the information gain of a swarm can grow, i.e., the maximum rate at which the robots can find and share information
Uncertainty cost, CU: The amount of reward that the swarm is loosing due to not knowing about where worksites are located.
Displacement cost, CD: The amount fo reward that the swarm is loosing due to robots that are informed but are not located at their worksites (for example, because there is congestion around worksites or because the robots were recruited away from worksites and are traveling to them).
Displacement cost coefficient, d: Represents a ratio between the amount of CD and the decrease in CU paid at a given time. When d = 1, all robots that know about worksites are displaced from them and no reward is obtained. Intermediate values of 0 < d < 1 indicate that some robots are displaced and some are receiving reward.
Misinformation cost, CM: The amount of reward that the swarm is loosing due to robots that have incorrect information and are trying to access worksites that no longer exist (for example, because they were depleted by other robots).
 When the number of worksites remains the same between two moments in time, the amount by which uncertainty cost decreases is proportional to the increase of information gain and vice versa:
When the number of worksites remains the same between two moments in time, the amount by which uncertainty cost decreases is proportional to the increase of information gain and vice versa:ΔI(t) × r = -ΔCU(t)
where r is the amount of reward available per worksite and per robot.
The swarm cannot utilise information about worksites and obtain the full expected reward for free - it has to pay the displacement and misinformation costs associated with its control strategy. The sum of these costs explains the difference between the expected and the actual reward:
CD + CM = R' - (r/ρ)*ΔR
where ρ is the reward intake rate.
Finally, the sum of all three costs is related to the difference between the potential and the actual reward:
CU + CD + CM = R* - (r/ρ)*ΔR
In the paper "The Information-Cost-Reward framework for understanding robot swarm foraging", the way in which swarms with various control strategies pay various costs is explored.
An example

The figure above shows an example of how the various costs are paid in an environment with two worksites by a swarm where robots can let each other know where worksites are (i.e., the robots can "recruit" each other).
At the beginning, all robots are uninformed, paying the maximum amount of uncertainty cost. CU decreases when robots learn about a worksite (i.e, they "subscribe" to it), while CD increases as most of those robots are recruits that are not yet located at the worksite. When one worksite gets depleted (just after the first 1.5 hours), the total uncertainty cost decreases, since there is one less worksite that the swarm needs to know about. At the same time, robots that were subscribed to the worksite but were not located at it stop paying CD and pay misinformation cost instead. CM is paid until the robots determine that the worksite is in fact depleted and they abandon it. The task is completed when all worksites are depleted (after around 2.5 hours), and all costs fall to 0.